手指机器人用户指南¶
手指机器人是 GL.iNet KVM 设备的附件,为远程电源管理提供额外的便利。
作为物理按钮仿真器,手指机器人专为远程 PC 开机/关机而设计。它的特点是易于粘贴安装,电池续航时间长达一年,适合日常使用,并且不需要复杂的设置。

包装内容¶
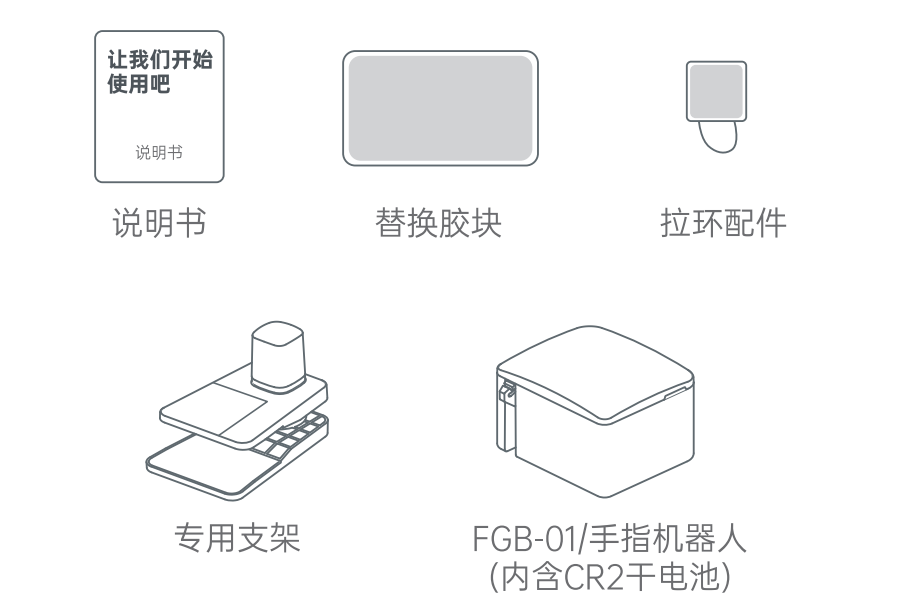
- 1 个 FGB-01
- 1 x 笔记本电脑支架
- 1 x 附加组件
- 1 x CR2 电池(安装在 FGB-01 中)
- 1 x 胶带
- 1 x 用户指南
安装¶
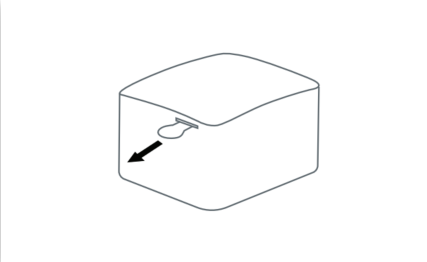
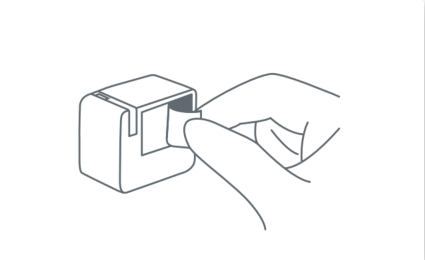
1.取下塑料电池隔离片。
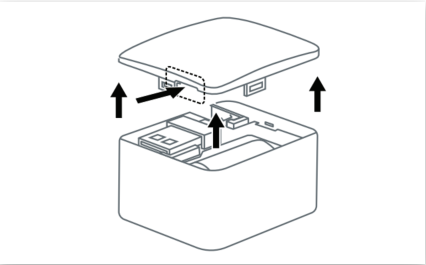
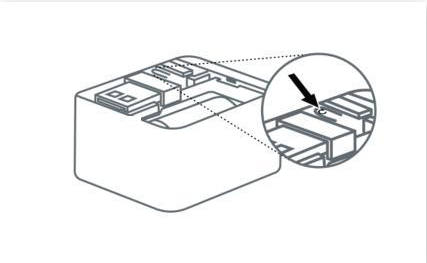
2.从 Fingerbot 顶部的槽口打开盖子。
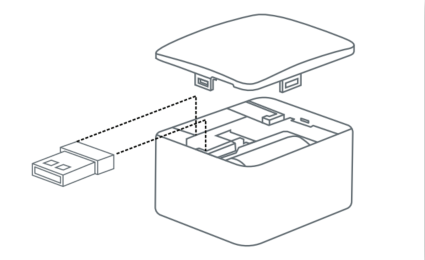
3.找到 USB 蓝牙接收器,将其插入 GL.iNet KVM(例如 Comet GL-RM1)的 USB 端口,然后盖上 Fingerbot 的盖子。
4.清洁受控设备上的电源按钮表面。
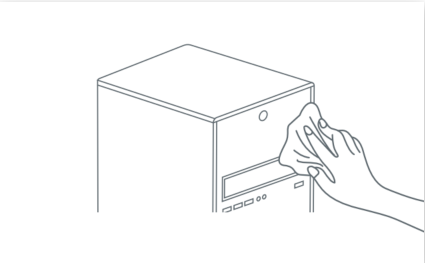
5.撕下 Fingerbot 底部胶带上的保护贴纸。
6.将手指机器人粘在受控设备上,确保其机械臂在按下时可以触及物理电源按钮。这允许控制设备的电源。
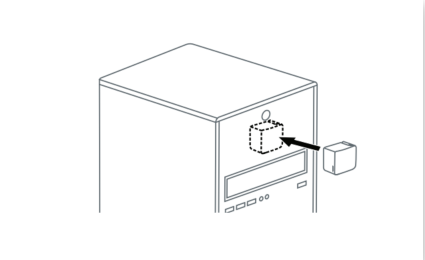
手指机器人可以安装在台式机或笔记本电脑上。对于笔记本电脑,仅当电源按钮位于侧面时,才使用它。


设置¶
1.登录到 GL.iNet KVM 设备的控制面板。
2.在 KVM 控制面板中,导航到附件以自定义 Fingerbot 设置。
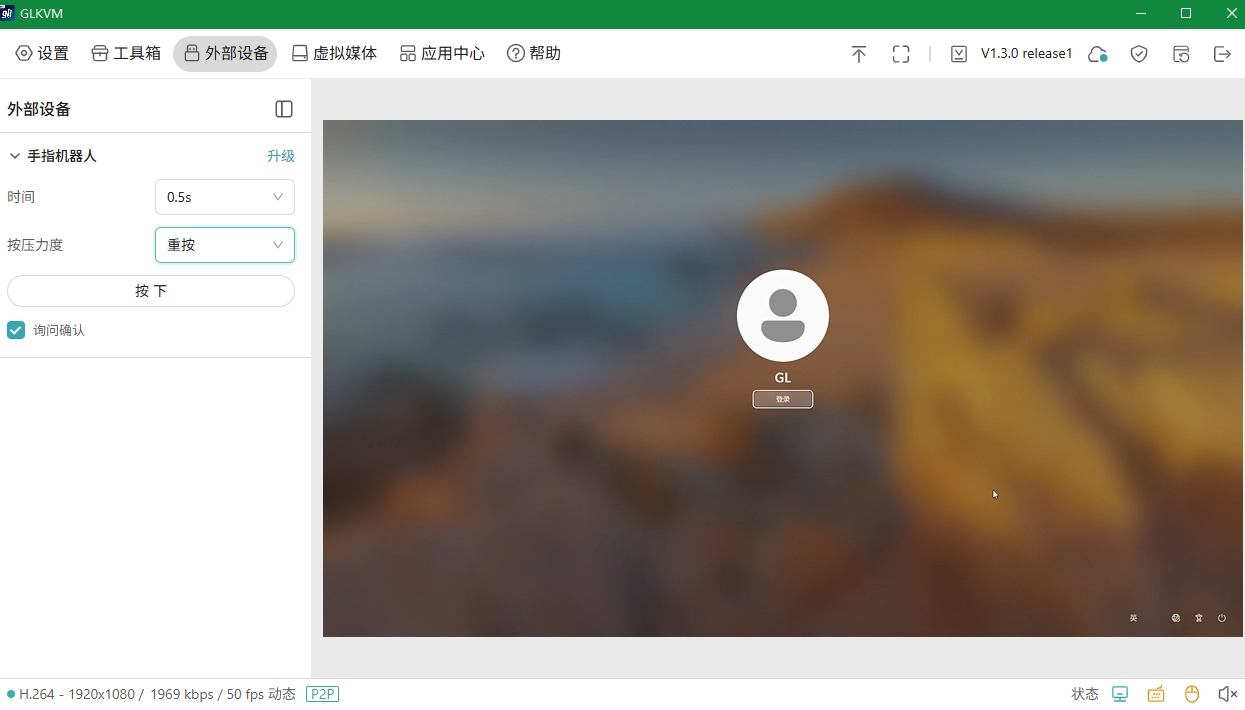
注意:附件设置仅在安装后显示。
-
时间:Fingerbot 按下的持续时间。
-
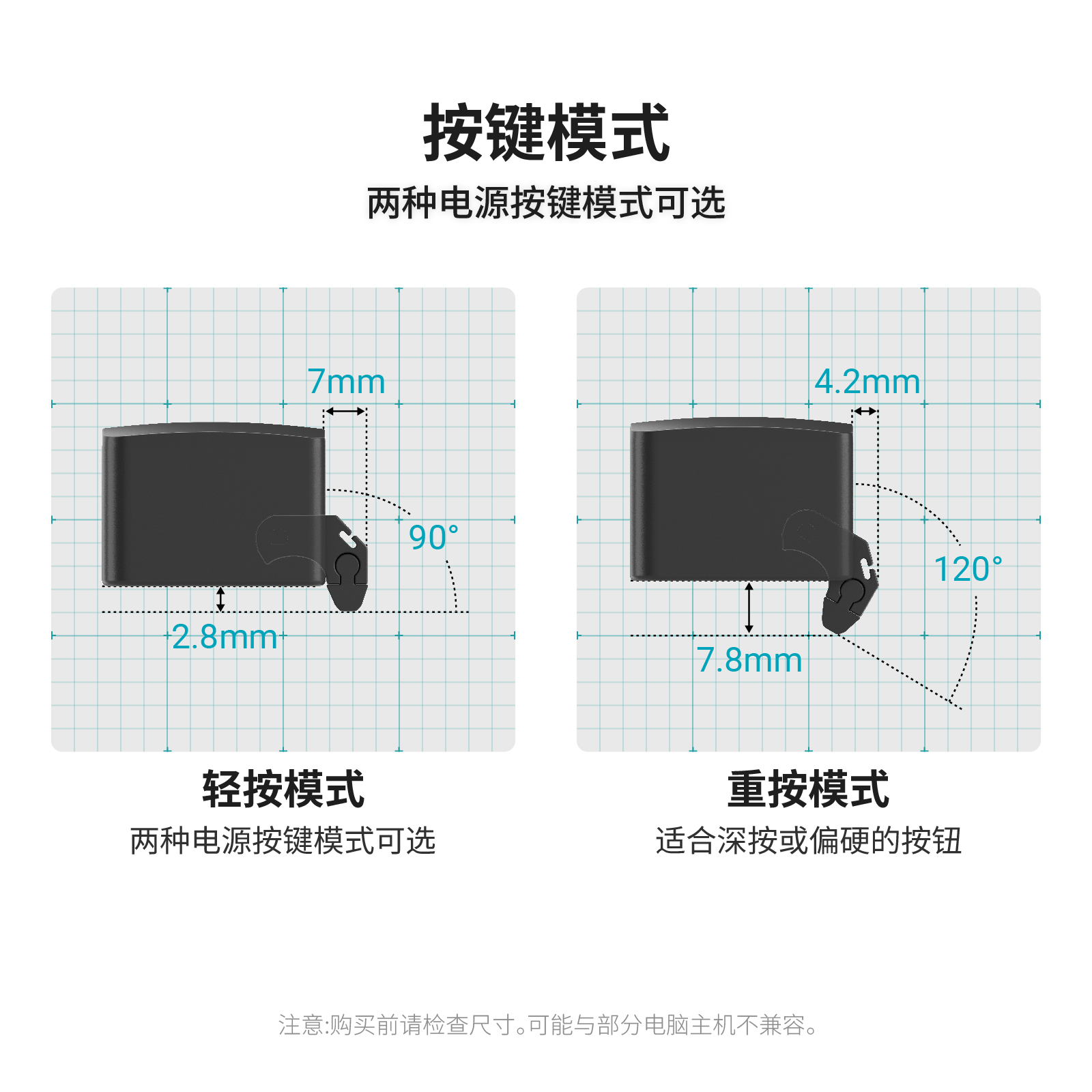
强度: 提供两个级别的压制强度:轻压模式和硬压模式。
-
轻按模式:非常适合短按钮或轻触按钮。
-
硬按模式:非常适合深按钮或硬按钮。
您还可以使用测试按钮(在手指机器人中,取下顶盖后可见)来查找您喜欢的按压级别:
常见问题¶
问题 1.手指机器人的 USB 接收器使用什么协议?
答 1.它使用蓝牙协议。
问题 2.手指机器人机身是否与 USB 蓝牙接收器配对?如果我的 USB 蓝牙接收器丢失了,我可以使用另一个吗?
答 2.手指机器人及其 USB 蓝牙接收器是唯一配对的。由于绑定,其他接收器无法与手指机器人一起使用。
问题 3.手指机器人是否与非 GL.iNet KVM 设备兼容?
答 3.不。手指机器人是 GL.iNet KVM 设备的可选附件。它应与 GL.iNet KVM 结合使用。