快速设置指南¶
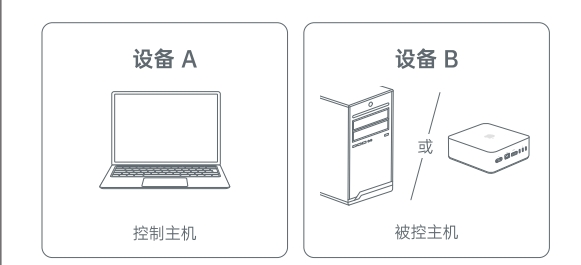
连接设备¶
-
将 GL-RM1连接到电源。

-
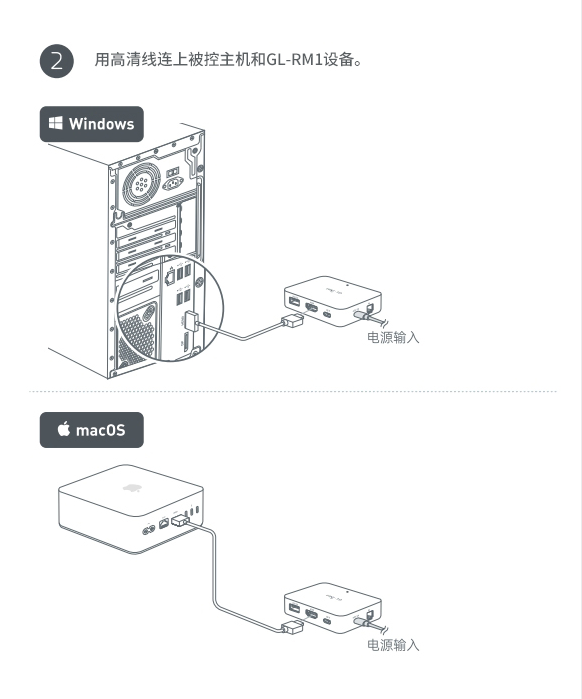
使用高清线将 GL-RM1 的 HD-IN 端口连接到设备 B 的 HD-OUT 端口。
-
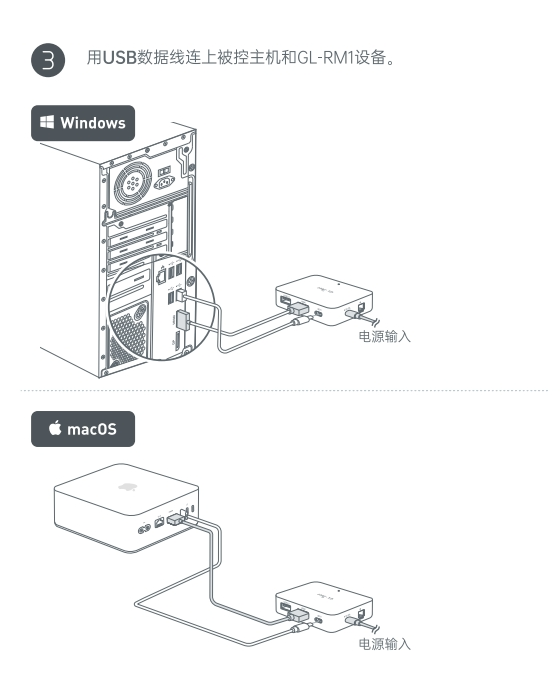
用 USB 数据线连上被控主机和 GL-RM1设备。
-
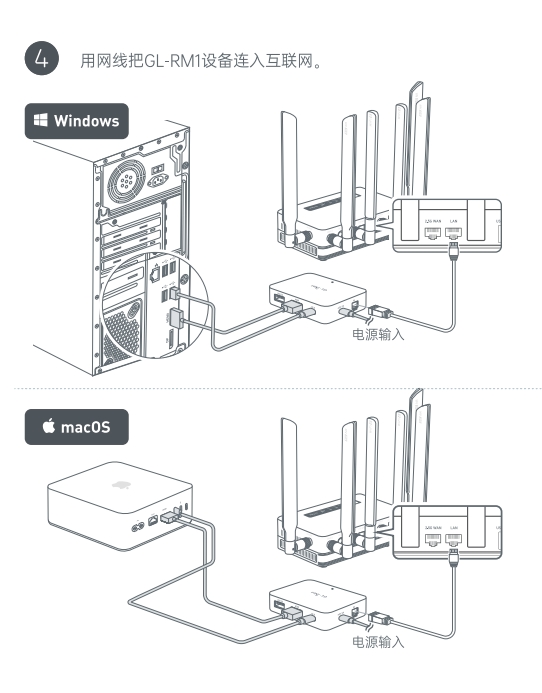
用网线把 GL-RM1 设备连入互联网。
本地访问 GL-RM1¶
方法 1. 通过域名
打开浏览器,输入“glkvm.local”,您将进入本地管理页面。
方法 2. 通过 IP 地址访问
在上级路由器中找到 GL-RM1 的 IP 地址,在浏览器中输入此 IP 地址,您将能够在本地访问 GL-RM1,从而访问连接到 GL-RM1 的受控设备。
以 GL-AXT1800 为例。此处通过以太网线将 GL-RM1 连接到 GL-AXT1800路由器的 LAN 口,因此 GL-AXT1800 是上级路由器。登录 GL-AXT1800 的 web 管理面板,在客户端列表中找到 GL-RM1的 IP 地址,如下所示。

在浏览器打开该IP地址,即可在本地访问 GL-RM1。
远程访问 GL-RM1¶
方法 1. 通过云服务
-
绑定您的设备到云平台。
这一步需要通过本地访问完成。
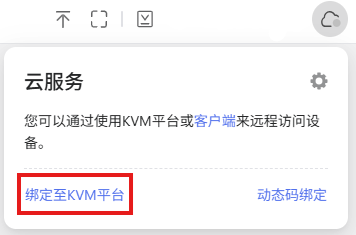
点击右上角的云服务 -> 绑定至KVM平台
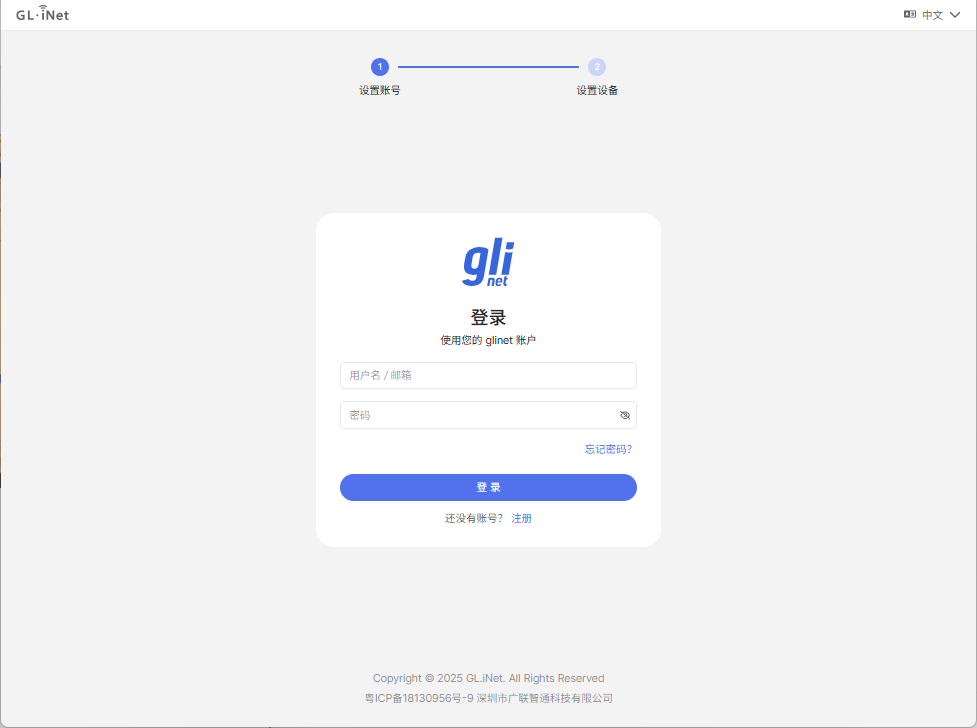
您将被重定向到登录页面,请输入您的 GL-iNet 账户信息并点击登录。
确认您的设备信息后,单击绑定按钮。

等待几秒后,您的设备将成功绑定到您的帐户。单击完成 。
-
通过云平台进行远程访问
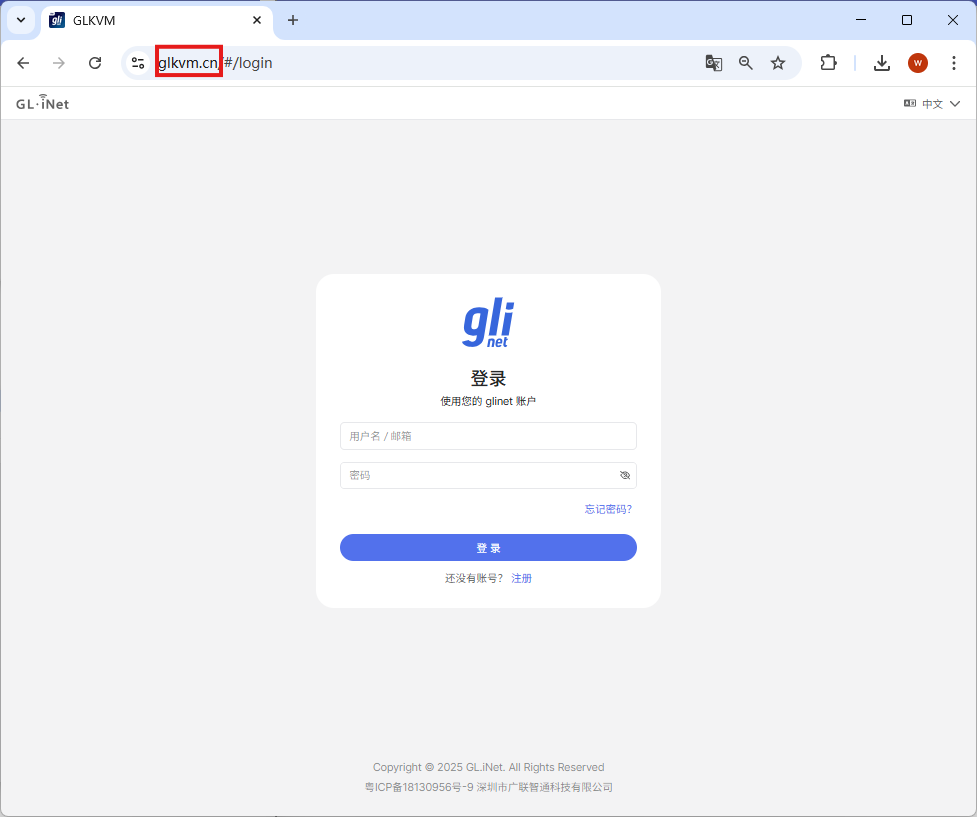
打开浏览器(以 Google Chrome 为例),在地址栏中输入glkvm.cn。您将看到登录页面。使用您的GL-iNet帐户登录。
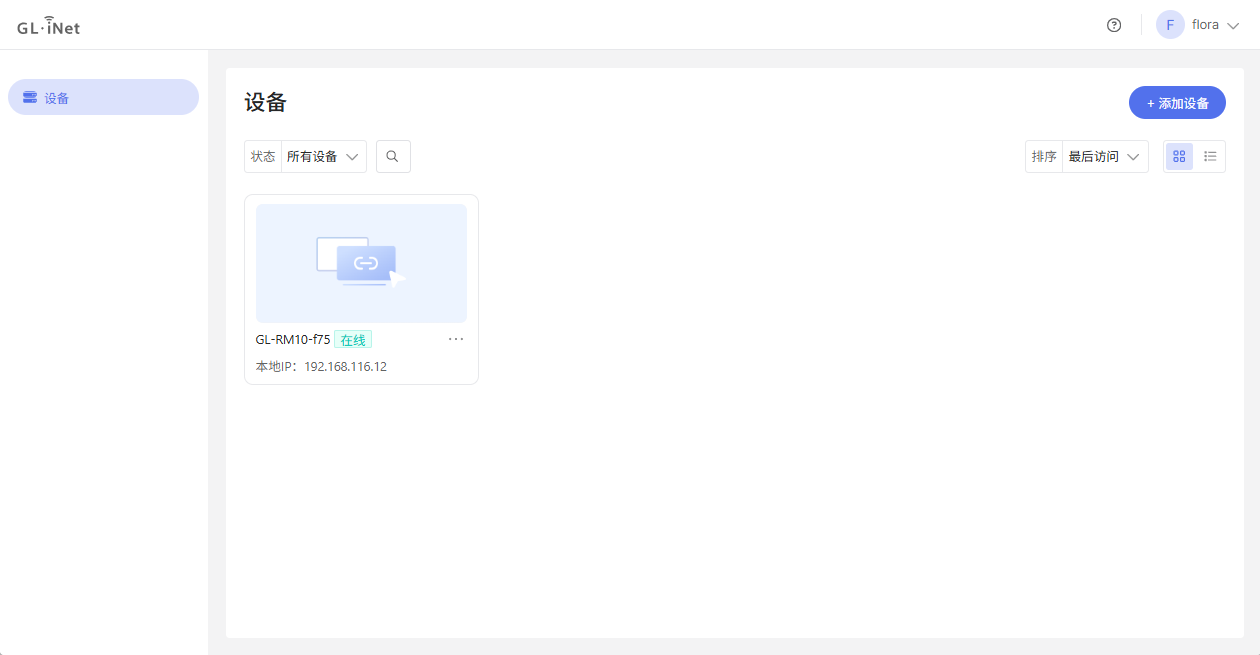
登录后,您将看到已绑定到您账户的设备,单击您要远程访问的设备。
系统将打开一个新标签页,输入设备的管理员密码后登录。

方法 2. 通过 GLKVM 应用程序
-
在您的控制设备上安装 GLKVM App。
-
注册帐户。
注册 GL.iNet 账号,如果已有账号,请跳到下一步。

-
登录帐户。
输入用户名和密码登录。

-
绑定您的设备。
有多种方法可以将 GL-RM1 绑定到您的帐户。
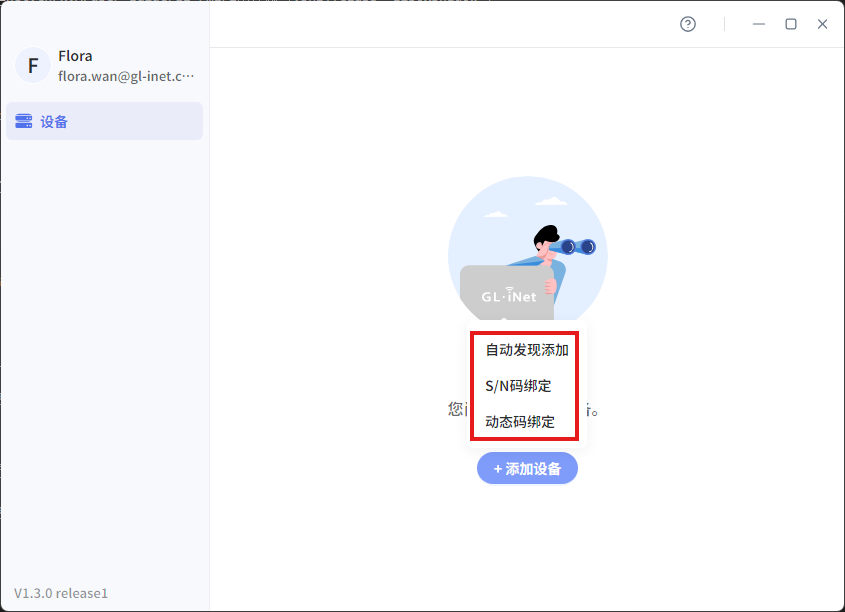
请确保当前的控制设备与 GL-RM1 位于同一局域网中。
点击“自动发现设备”,选择您的 GL-RM1。

点击“S/N绑定”,自定义设备名称,输入 GL-RM1 背面标签上的SN序列号。

绑定后,您就可以使用 GL-RM1 远程访问受控设备了。
方法 3. 通过 Tailscale
GL-RM1 集成了 Tailscale 应用,您可以将其绑定到 Tailscale 虚拟网络进行远程访问。
在 GL-RM1 的控制面板中,打开应用中心 -> Tailscale,将 GL-RM1 绑定到您的 Tailscale 帐户,然后在控制主机的 web 浏览器中,输入 GL-RM1 的 Tailscale 虚拟 IP 即可远程访问 GL-RM1,而无需安装 GLKVM 应用程序。
有关 Tailscale 的更多说明,请参阅 Tailscale 文档.
外部设备¶
GL.iNet 为 KVM 设备提供可选配件,为远程管理提供额外便利。
手指机器人¶
手指机器人充当物理按钮模拟器,旨在实现对受控设备上物理电源按钮的远程控制。
取下手指机器人上方的盖子,找到一个USB无线接收器,将其插入 GL-RM1 的USB端口。
然后将手指机器人连接到受控设备上,确保手指机器人的机械臂在向下按压时能够接触到受控设备的物理电源按钮,从而实现对受控设备电源的控制。
然后,您可以登录 GL-RM1 的控制页面,转到外部设备设置手指机器人。
详情请参阅 手指机器人用户指导 。
ATX 板¶
ATX板作为智能电源管理模块,通过模拟物理电源按钮操作(电源开/关/重启),实现对受控设备电源的远程控制。
与通过物理按键控制设备的手指机器人不同,ATX 板将直接安装在受控设备的主机箱中,提供更隐蔽、更稳定的电源管理。
详情请参阅 GL-ATX 板用户指导 。